MADRID, 4 Oct. (EUROPA PRESS) -
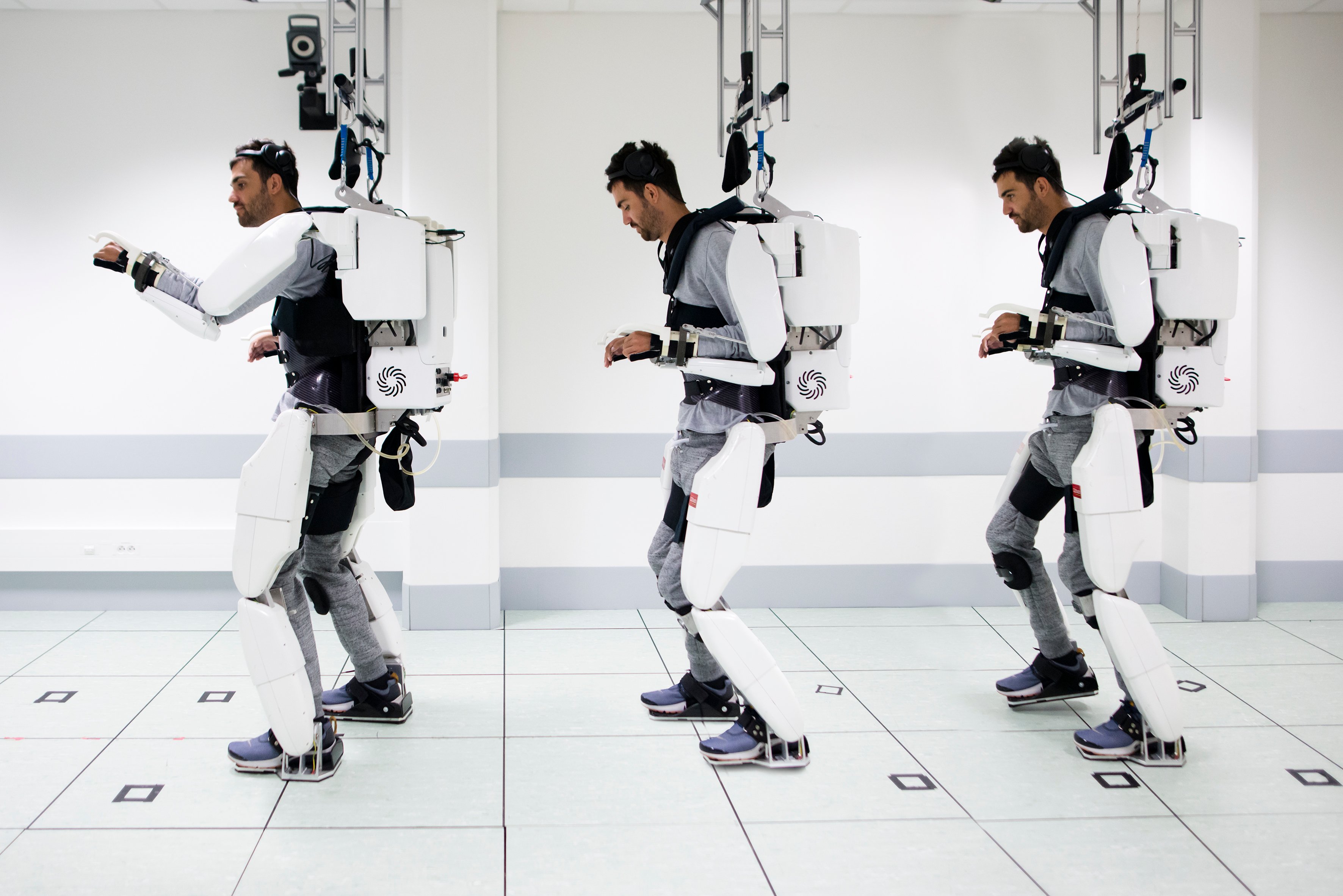
Un exoesqueleto de cuatro patas y controlado por señales cerebrales ha ayudado a un hombre tetrapléjico a mover sus brazos y caminar usando un arnés anclado al techo para mantener el equilibrio. Aunque los primeros resultados son "prometedores", los autores puntualizan que este sistema está "muy lejos" de la aplicación clínica y requerirá "mejoras" antes de que esté disponible.
El paciente, de 28 años, quedó paralizado de los hombros hacia abajo, con solo algo de movimiento en los bíceps y la muñeca izquierda, con la que era capaz de manejar una silla de ruedas a través de un 'joystick'. En el estudio, publicado en la revista 'The Lancet Neurology', se le implantaron dos dispositivos de registro, uno a cada lado de la cabeza, entre el cerebro y la piel, para abarcar la corteza somatosensorial (el área del cerebro que controla la sensación y la función motora).
Cada dispositivo contenía una cuadrícula de 64 electrodos que recogían las señales cerebrales y las transmitía a un algoritmo de decodificación. Este sistema tradujo las señales cerebrales en los movimientos en los que el paciente pensaba, y envió órdenes al exoesqueleto para completarlos.
A lo largo de los 24 meses de la investigación, el paciente realizó varias tareas mentales para entrenar el algoritmo, con el objetivo de que la inteligencia artifical (IA) pudiera comprender sus pensamientos y aumentar progresivamente el número de movimientos que podía realizar. Esto incluía controlar un avatar virtual para jugar a un videojuego o caminar.
El progreso del paciente se midió en términos de cuántos grados de libertad fue capaz de lograr durante las tareas, desde operar un interruptor con energía cerebral para comenzar a caminar, hasta llegar a tocar objetos 2D y 3D. El exoesqueleto tiene 14 articulaciones y 14 grados de libertad (podía moverse de 14 maneras diferentes). Pasó un total de 45 días usando el exoesqueleto en el laboratorio y las habilidades que adquirió fueron reforzadas con 95 días de entrenamiento en casa con un investigador usando el avatar y el videojuego.
Las tareas más sencillas eran encender el interruptor del cerebro para empezar a caminar en un videojuego en el que hacía caminar a un avatar, y hacer que el exoesqueleto empezara a caminar mientras estaba sujeto al arnés. Su éxito se midió en términos de cuántas veces se las arregló para activar el interruptor. Dos meses después de someterse a una cirugía, tuvo éxito el 73 por ciento de las veces durante seis sesiones usando el exoesqueleto. Utilizando el avatar, el videojuego y el exoesqueleto combinados, cubrió un total de 145 metros con 480 pasos en 39 sesiones.
Usando tanto el avatar como el exoesqueleto para tareas más complejas, progresó de alcanzar objetivos en cubos con una mano a la vez (moviéndose en tres dimensiones) cinco meses después de la cirugía a usar ambas manos para tocar objetivos en los cubos 16 meses después de la cirugía (moviéndose en ocho dimensiones, incluyendo la rotación de ambas muñecas). Completó cinco tareas en ocho dimensiones con una tasa de éxito del 71 por ciento.
"Nuestros hallazgos podrían acercarnos un paso más a ayudar a los pacientes tetrapléjicos a manejar ordenadores usando solo señales cerebrales, tal vez comenzando con conducir sillas de ruedas usando actividad cerebral en lugar de 'joysticks' y progresando hacia el desarrollo de un exoesqueleto para aumentar la movilidad", explica el profesor Stephan Chabardes, neurocirujano de la CHU de Grenoble-Alpes (Francia).
Se han reclutado tres pacientes más y el ensayo está en curso. El siguiente objetivo de los investigadores es resolver el problema de permitir que un paciente camine y se equilibre de forma autónoma sin utilizar un sistema anclado al techo.